RÉSUMÉ EN PORTUGAIS
INSTRUMENTOS DE NAVEGACIÓN
Introdução
Há uma miríade de técnicas e instrumentos disponíveis para ajudar o piloto a navegar na aeronave. O tipo de instrumentos que podem ser encontrados numa determinada aeronave depende do seu nível de sofisticação: uma aeronave VFR ligeira está equipada com instrumentos simples, enquanto uma aeronave comercial requer instrumentos muito mais complexos.
Bússola magnética
Como a bússola magnética funciona com base no princípio do magnetismo, é bom que o piloto tenha pelo menos um conhecimento básico do magnetismo. Um simples íman em barra tem dois centros de magnetismo, designados por pólo norteN e pólo sul S). As linhas de força magnética partem do pólo norte em todas as direcções e acabam por se curvar em direção ao pólo sul. A área atravessada por estas linhas de força é designada por campo magnético.
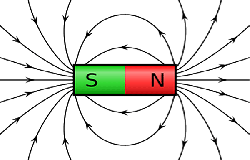
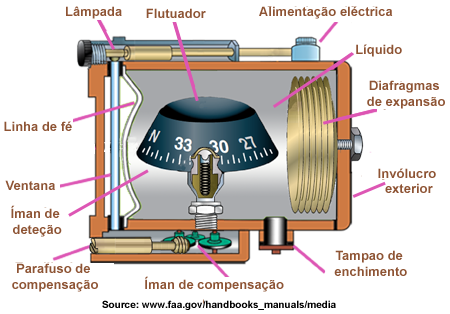
Diagrama de uma bússola magnética
Bússola giroscópica
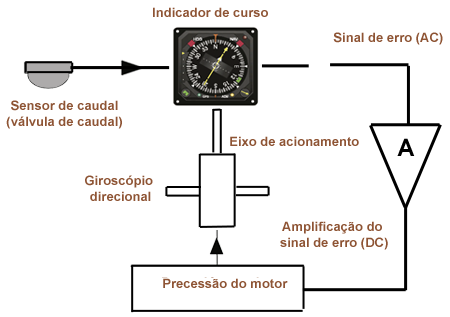
LA bússola giroscópica é uma bússola cujo indicador de rumo é ajustado a uma determinada referência por meio de um sensor de indução.
O seu objetivo é :
- fornecer ao piloto uma indicação precisa do rumo
- fornecer ao piloto automático uma referência de rumo a manter.
É composto por:
- um detetor de campo magnético (fluxgate)
- um servo azimute
- um amplificador
- um giroscópio direcional (DG)
ode funcionar:
- como uma bússola giroscópica (utilização normal)
- como um giroscópio direcional convencional (utilização de emergência)
Um diagrama esquemático de uma bússola giroscópica é apresentado abaixo.
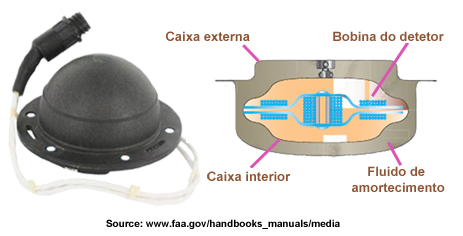
Detetor de campo magnético - palhetas de fluxo
Este conjunto apresenta-se exteriormente sob a forma de uma caixa hemisférica em forma de taça. No interior desta caixa encontra-se uma válvula de fluxo suspensa num pêndulo por uma engrenagem de marcação. Esta válvula é livre de oscilar mais ou menos 25° nos eixos de rotação e de inclinação, mas está integrada na aeronave em azimute. O balde está parcialmente cheio de líquido para amortecer as oscilações da válvula de fluxo. O conjunto é instalado num local remoto e livre de qualquer influência perturbadora, geralmente na ponta da asa ou no flap..
Secção transversal de uma válvula de fluxo
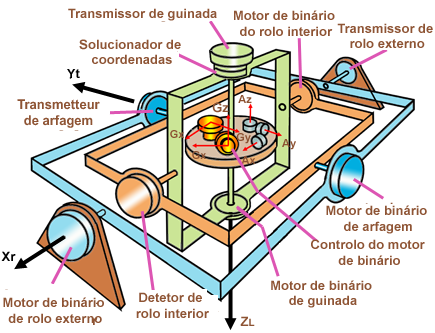
Sistema de navegação por inércia
Um sistema de navegação por inércia (INS) é um instrumento utilizado na navegação, capaz de integrar os movimentos de um objeto em movimento (aceleração e velocidade angular) para estimar a sua orientação (ângulos de rotação, inclinação e rumo), velocidade linear e posição. A estimativa da posição é relativa ao ponto de partida ou ao último ponto de recalibração. A unidade de inércia é um meio de navegação autónomo que não utiliza qualquer informação de fontes externas.
A plataforma mantém-se horizontal em relação aos pontos de referência no solo, independentemente do movimento da aeronave. Isto é conseguido através da utilização de gimbals que permitem que a plataforma se mova livremente nos três eixos (pitch, roll e yaw).
.
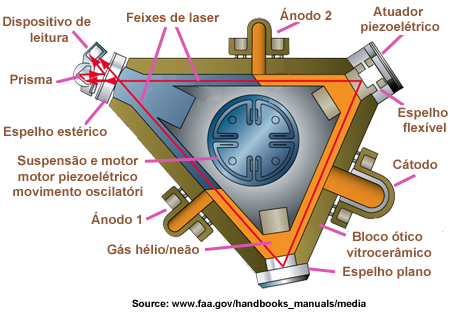
Giroscópio de anel laser
O giroscópio laser é muito utilizado na aviação comercial. Trata-se de um sensor de velocidade angular (giroscópio) que utiliza um feixe laser. O seu funcionamento baseia-se no facto de a luz demorar tempo a percorrer uma trajetória circular estacionária e não rotativa. O princípio de funcionamento de um giroscópio é que dois feixes de laser que se propagam em direcções opostas têm frequências diferentes, dependendo a diferença da velocidade de rotação. A medição desta diferença dá o ângulo de rotação ou a velocidade de rotação em torno do eixo sensível do giroscópio.