
HÉLICOPTÉRE
AUTOROTATION
Introduction
L'autorotation est l'état de vol dans lequel le système du rotor principal est mis en rotation par l'action du vent relatif orienté vers le haut, plutôt que par la puissance du moteur qui entraîne le rotor. C'est le moyen par lequel un hélicoptère peut se poser en toute sécurité en cas de panne moteur. Dans ce cas, l'altitude de l'hélicoptère est utilisée comme énergie potentielle et convertie en énergie cinétique pendant la descente et le toucher des patins ou des roues.
Le Robinson R66 mono-turbine avec un rotor bipale tournant dans le sens contraire des aiguillles d'une montre (vu de dessus) sera pris pour modèle.

Principe de fonctionnement
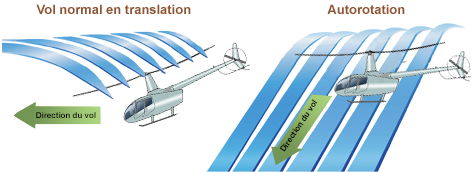
En vol motorisé normal, l'écoulement de l'air est aspiré dans le rotor principal par le haut et évacué vers le bas (à gauche, dessin ci-dessous), mais en autorotation, l'écoulement ascendant du vent relatif permet aux pales du rotor principal de tourner à leur vitesse normale. En fait, les pales " glissent " dans leur plan de rotation.
L'autorotation est permise mécaniquement par un mécanisme d'embrayage spécial permettant au rotor principal de continuer à tourner même si le moteur ne tourne pas. Si le moteur tombe en panne, le dispositif de roue libre désengage automatiquement le moteur du rotor principal, ce qui permet à ce dernier de tourner librement. Tous les hélicoptères doivent démontrer cette capacité pour être certifiés.
Autorotation verticale
La plupart des autorotations sont effectuées en vol de translation vers l'avant. Par souci de simplicité, l'explication aérodynamique suivante est basée sur une descente verticale en autorotation (sans vitesse horizontale) en air calme. Dans ces conditions, les forces qui font tourner les pales sont similaires pour toutes les pales, quelle que soit leur position dans le plan de rotation. Par conséquent, la dissymétrie de la portance résultant de la vitesse de l'hélicoptère n'est pas un facteur.
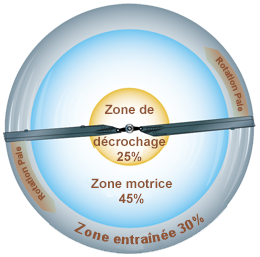
En autorotation verticale, le disque rotor est divisé en trois zones (dessin ci-dessous) :
- la zone entraînée,
- la zone motrice,
- la zone de décrochage.
Voici les différentes zones de la pale pendant la descente en autorotation.
Le dessin ci-dessous montre les trois zones de pale qui illustrent les vecteurs de force :
- la partie A est la zone entraînée,
- B et D sont les points d'équilibre,
- la partie C est la zone d'entraînement ou motrice,
- la partie E est la zone de décrochage.
Les vecteurs de force sont différents dans chaque zone parce que le vent relatif dû à la rotation des pales est plus lent près du pied de la pale et augmente continuellement vers l'extrémité de la pale. De plus, la torsion (vrillage) de la pale donne un angle d'attaque plus positif dans la zone motrice que dans la zone entraînée. La combinaison du flux vers le haut à travers le rotor avec le vent relatif de rotation produit différentes combinaisons de forces aérodynamiques à chaque point le long de la pale.
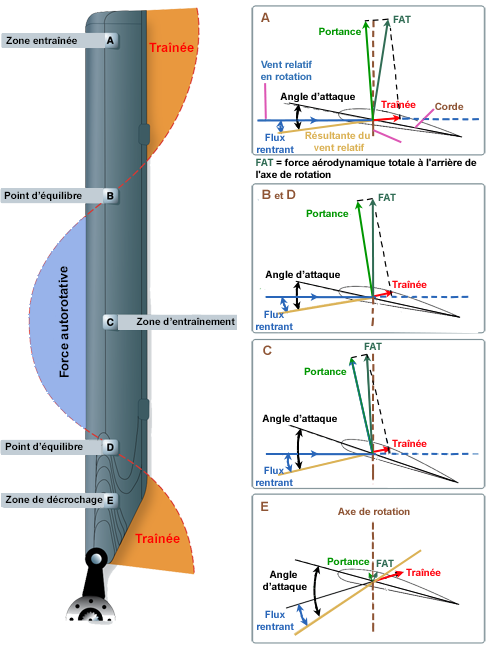
La zone entraînée aussi appelée région de l'hélice, est la plus proche des extrémités des pales. Normalement, elle représente environ 30 % du rayon de la pale. Dans cette zone, la FAT (force aérodynamique totale) agit derrière l'axe de rotation, ce qui entraîne une force de traînée globale. La zone entraînée produit une certaine portance, mais cette portance est compensée par la traînée. Le résultat global est une décélération de la rotation de la pale. La dimension de cette zone varie en fonction du pas de la pale, du taux de descente et du régime du rotor. Lorsque l'on modifie le régime de rotation en autorotation du pas de pale ou de la vitesse de descente, la taille de la zone entraînée par rapport aux autres zones change également.
Deux points d'équilibre : un entre la zone entraînée et la zone d'entraînement (motrice), et un entre la zone d'entraînement et la zone de décrochage. Aux points d'équilibre, la FAT est alignée sur l'axe de rotation (ci-dessus dessins B et D). La portance et la traînée sont produites, mais l'effet total ne produit ni accélération ni décélération.
La zone d'entraînement ou motrice, ou encore d'autorotation, se situe normalement entre 25 et 70 % du rayon de la pale. Cette zone produit les forces nécessaires pour faire tourner les pales en autorotation. La FAT (ci-dessus, dessin C) dans cette zone est légèrement inclinée vers l'avant de l'axe de rotation, ce qui produit une force d'accélération continue. Cette inclinaison fournit la traction, qui tend à accélérer la rotation de la pale. La dimension de cette zone d'entraînement varie selon le réglage du pas des pales, du taux de descente et du régime du rotor.
En contrôlant la dimension de cette zone, le pilote peut régler le régime d'autorotation. Par exemple, si le pas collectif est relevé, l'angle de pas augmente dans toutes les régions. Le point d'équilibre se déplace alors vers l'intérieur le long de l'envergure de la pale, ce qui augmente la taille de la zone entraînée. La région de décrochage devient également plus grande alors que la zone d'entraînement devient plus petite. La réduction de la taille de cette zone d'entraînement entraîne une diminution de la force d'accélération de la zone motrice et du régime. Un régime rotor constant est obtenu en réglant le pas collectif de manière à ce que les forces d'accélération des pales de la zone d'entraînement soient équilibrées avec les forces de décélération des zones entraînées et de décrochage.
La zone de décrochage occupe environ 25 % de la pale et fonctionne au-dessus de l'angle d'attaque maximal (angle de décrochage), ce qui entraîne une traînée qui tend à ralentir la rotation de la pale. (ci-dessus dessin E)
Autorotation en translation avant
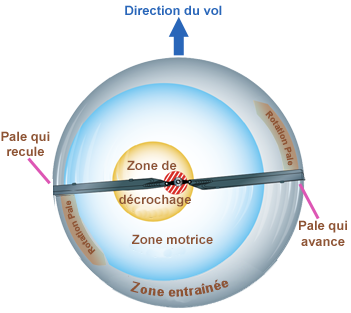
La force d'autorotation en translation avant est produite exactement de la même manière que lorsque l'hélicoptère descend verticalement en air calme. Toutefois, comme la vitesse de translation modifie le vent relatif vers le haut à travers le disque rotor, les trois zones se déplacent le long de l'envergure des pales du côté de la pale qui recule, où l'angle d'attaque est plus grand, (dessin ci-dessous). Avec des angles d'attaque plus faibles sur la pale qui avance, une plus grande partie de cette pale passe dans la zone entraînée. Sur le côté de la pale qui recule, une plus grande partie de la pale se retrouve dans la zone de décrochage. Une petite zone près de l'emplanture subit un écoulement inverse, ce qui réduit la taille de la zone entraînée du côté du recul.
Les différentes zones de la pale en autorotation en translation avant.
Atterrissage en autorotation
Déroulement de l'autorotation après panne moteur ou simulation de panne :
- abaisser le pas collectif (pas général) ;
- mise de l'hélicoptère face au vent ;
- contrôle et stabilisation de l'angle et de la vitesse de descente avec le pas cyclique en veillant à maintenir les tours du rotor dans le vert à l'aide du pas collectif ;
- réalisation de l'arrondi ou "flare" en mettant du cyclique en arrière afin de diminuer la vitesse de translation et la forte vitesse verticale ;
- remise à l'horizontale de l'hélicoptère pour avoir une assiette proche du vol stationnaire avec soutient en tirant le pas collectif vers le haut jusqu'au touché avant que les tours du rotor ne s'effondrent ;

Note : L'entraînement à l'autorotation ne se fait que pour les hélicoptères monomoteurs. Pour les bimoteurs, la panne de deux moteurs en même temps n'est pas envisagée.
Source de ce chapitre :
Rotorcraft Flying Handbook-FAA
Helicopter Instructor's Handbook- FAA.


