
TRAFFIC COLLISION AVOIDANCE SYSTEM
TCAS II
Choix de l'avis de résolution
Lors d’une rencontre entre deux aéronefs équipés de TCAS II, chaque aéronef émet des interrogations à l’autre aéronef par l’intermédiaire de la liaison de données Mode S sous la forme d’un RAC (avis de résolution complémentaire). L'avion de réception note les interrogations du RAC mais ne répond pas. Les RAC sont envoyés afin de garantir la sélection d’avis de résolution complémentaires en limitant le choix des manœuvres à la disposition du TCAS II recevant le RAC. Les interrogations de coordination utilisent les mêmes canaux 1030/1090 MHz que les interrogations de surveillance et sont transmises au moins une fois par seconde par chaque aéronef pendant la durée du RA. Chaque aéronef continue de transmettre des interrogations de coordination à l’autre tant que celui-ci est considéré comme une menace (c’est-à-dire qu’un RA est actif).
Les interrogations de coordination contiennent des informations sur la manœuvre envisagée par un aéronef contre la menace d'un autre avion. Ces informations sont exprimées sous la forme d’un complément.
Exemple : Si un aéronef a sélectionné un avis "en montée", il transmettra un message à l'autre avion (menace), en limitant la sélection des RA pour l'autre avion à ceux de "Descente".
La règle de base pour la sélection de sens lors d’une rencontre TCAS-TCAS est qu’avant de sélectionner un sens, chaque TCAS doit vérifier s’il a reçu un complément de l'autre avion indiquant son intention. Si tel est le cas, le TCAS se conforme aux attentes des autres avions. Sinon, le TCAS sélectionne le sens qui convient le mieux à la géométrie de la rencontre.
Dans la grande majorité des cas, les deux aéronefs se voient comme des menaces à des moments légèrement différents. La coordination se déroule comme suit : le premier aéronef sélectionne le sens du RA en fonction de la géométrie de la rencontre, et transmet son intention ; le deuxième aéronef choisit alors le sens opposé et confirme son intention.
Sélection de sens
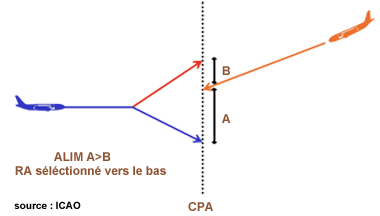
La première étape consiste à sélectionner le sens (évitement vers le haut ou vers le bas) du RA. En utilisant les résultats du suivi vertical et horizontal, la logique modélise le chemin de l'intrus vers le CPA (Closest Point of Approach ou Point d'approche le plus proche en français).
Le dessin ci-dessous montre les chemins qui résulteraient de la montée ou de la descente de son propre avion à 1500 ft/min, avec prise en compte d'une réponse standard du pilote (temps de réaction de 5 secondes et accélération verticale de 1⁄4 g). La logique CAS (Collision Avoidance System) calcule la séparation verticale prédite pour chacun des deux cas et sélectionne normalement le sens qui fournit la distance verticale la plus grande.
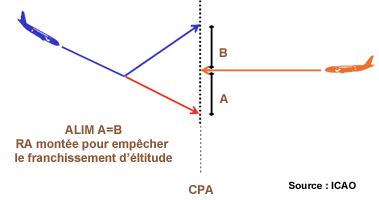
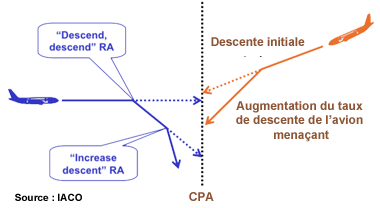
Dans les cas où un croisement de l'altitude de l'autre avion est projeté avant le CPA, la logique CAS choisira le sens qui évite ce croisement d'altitude, à condition que la distance verticale résultante à CPA soit suffisante. Le dessin ci-dessous illustre ce cas.
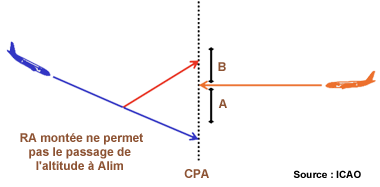
La distance de sécurité verticale souhaitée ALIM (altitude limite) varie de 300 à 700 ft, en fonction de l’altitude de votre propre avion. Si ALIM ne peut être atteint, un RA de traversée sera émis, dessin ci-dessous.
Toutefois, les mécanismes de retardement visent à réduire les RA de croisement d'altitude en différant un avis de résolution si :
- un aéronef est en croisière (palier) ou lorsque les deux aéronefs ont des vitesses verticales de sens opposé et qu'ils sont séparés d'au moins 600 ft ;
- lorsque les deux aéronefs ont une vitesse verticale dans le même sens et qu’ils sont séparés par une hauteur de 850 pieds.
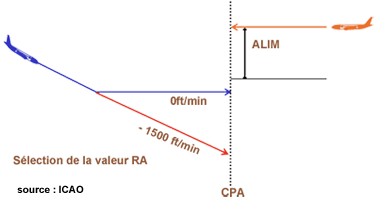
Sélection de la valeur de RA
Ensuite, on choisit la valeur de force de RA. La valeur est le degré de restriction imposé à la trajectoire de vol soit en limitant le taux vertical actuel, soit en exigeant un taux vertical modifié. Le TCAS II est conçu pour sélectionner une valeur de RA qui perturbera le moins possible la trajectoire de vol existante, tout en fournissant une distance de séparation ALIM dans laquelle la limite de vitesse verticale de 0 ft/min serait sélectionnée comme la distance minimale.
Dans la version 7.1, l'annonce RA “Level off, level off” impose une réduction du taux vertical à 0 ft/min. Cette réduction du taux vertical à 0 ft/min est parfois plus forte que nécessaire ; toutefois, cette modification a été apportée pour rendre l’intention de la limitation de vitesse verticale, sans ambiguïté et plus intuitive.
Une fois que le RA initial est sélectionné, la logique CAS surveille en permanence la séparation verticale qui sera fournie et, si nécessaire, le RA initial sera modifié, voire inversé si l'on prévoit que le RA émis initialement fournira un espacement vertical insuffisant. Pour les RA d’augmentation ou d’inversion, le changement de vitesse verticale doit commencer dans les 2½ secondes qui suivent l’affichage du RA et le changement de vitesse verticale doit être accompli avec une accélération d’environ 1/3 de G.
Renforcement de la valeur de RA
Un RA limitant la vitesse verticale (exemple : Monitor Vertical Speed or Level Off ) peut être renforcé en changeant la valeur de la vitesse verticale. Ce RA plus restrictif peut être un RA de montée ou de descente (exemple : taux vertical 1500 ft/min),
Inversion de RA
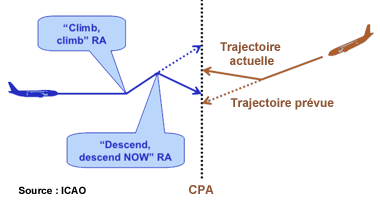
L'inversion du sens d'un RA est permise lors de rencontres coordonnées (c.-à-d. à bord des deux avions équipés du TCAS II) et lors de rencontres avec des aéronefs intrus non équipés du TCAS. Le dessin ci-dessous montre une rencontre où un premier RA en montée doit être inversé pour passer à un RA en descente après les manœuvres de l'avion de menace.
La version 7.1 intègre une nouvelle logique d'inversion qui détecte les géométries de "poursuite verticale à faible distance de sécurité verticale". Ce type de scénario peut se produire lorsqu'un aéronef ne suit pas le RA ou n'est pas équipé d'un TCAS II et suit une instruction ATC ou effectue une manœuvre d'évitement basée sur une acquisition visuelle.
Coordination L'inversion peut se produire lorsque deux aéronefs se sont déclarés simultanément comme une menace l'un pour l'autre et qu'ils ont tous deux choisi le même sens de RA. Si cela se produit, l'aéronef dont l'adresse 24 bits Mode S est plus élevée ("aéronef esclave") détectera l'incompatibilité et inversera le sens de son RA au sens opposé au RA généré par l'autre aéronef. L'aéronef ayant l'adresse 24 bits du mode S inférieur ("aéronef principal") n'est pas autorisé à inverser son RA à des fins de coordination.
Changement de la valeur de RA
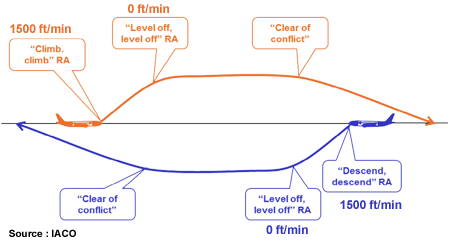
Au cours d’un RA, si la logique de la CAS détermine que la réponse à un RA a fourni une distance verticale égale ou supérieure à ALIM avant le CPA, c'est-à-dire que les aéronefs ont été espacés de façon sécuritaire en altitude, mais pas encore en distance, le RA initial sera changé (diminué) à un RA « Level off, level off » (dessin ci-dessous). Cela vise à minimiser les écarts inutiles par rapport à l’altitude initiale.
La logique d'évitement des collisions établit les limites de temps minimales pour la durée des RA comme suit :
- durée minimale d'un RA initial RA vers ClearofConflict 5 secondes ;
- temps minimum avant qu'une inversion RA puisse être émise 5 secondes ;
- temps minimum avant l'affaiblissement d'un RA environ 10 secondes ;
Un RA de renforcement peut être émis sans délai.
Fin d'un RA
L'aéronef intrus cesse d'être une menace lorsque la portée entre l'aéronef TCAS II et l'aéronef menaçant augmente (c'est-à-dire que le test de portée échoue) ou lorsque la logique considère que la distance horizontale à CPA sera suffisante. Si ces conditions sont remplies, l'avis de résolution est annulé et une annonce Clear of conflict est émise. Le pilote est alors tenu de revenir à l'autorisation initiale, sauf instruction contraire de l'ATC.
Arrêt d'un RA
La logique CAS peut empêcher une montée ou augmenter le RA en montée dans certains cas en raison des limites de performance en montée à haute altitude ou lorsque l'avion est en configuration d'atterrissage. Ces limitations sont connues par la logique, qui choisira alors un autre RA viable. Les limitations sont fixées au préalable par les autorités de certification en fonction du type d'aéronef.
De plus, lorsqu'un GPWS (Ground Proximity Warning System), un TAWS (Terrain Avoidance and Warning System) ou un avertissement de détection de cisaillement du vent a été activé, le TCAS II est automatiquement placé en mode TA uniquement et l'annonce sonore TA est supprimée. Le TCAS II reste en mode TA uniquement pendant 10 secondes après que le GPWS/TAWS ou l'avertissement de cisaillement du vent a été supprimé. Pendant cette période de suppression de 10 secondes, l'annonce sonore du TA n'est pas supprimée.
AIRBUS TCAS ALERT PREVENTION (TCAP)
Le paragraphe ci-dessous est basé sur le document de Paule Botargues The airbus Tcas alert prevention Tcap - https://safetyfirst.airbus.com
En réponse à des demandes d'amélioration, Airbus a lancé l'étude de faisabilité d'un nouveau système appelé TCAS Alert Prevention ou TCAP.
L'objectif de cette nouvelle fonction TCAP est double :
- réduire le nombre de TA du TCAS non désirés survenant lors de rencontres en palier à 1000 ft ; pour ce faire, on adapte la loi de la limite d'altitude afin d'adoucir l'arrivée de l'avion à une altitude voulue lorsque le trafic est confirmé dans le voisinage.
- ne pas dégrader les performances de l'aéronef, en particulier en descente, par une réduction prématurée et excessive de la vitesse verticale, lorsque cela n'est pas justifié.
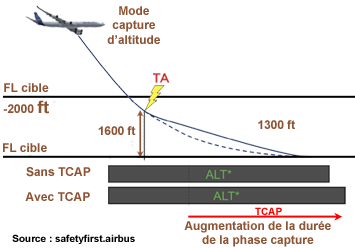
Cette fonctionnalité actuellement disponible utilise une nouvelle loi de capture d'altitude pour les calculateurs de guidage de vol, qui diminue la vitesse verticale de l'avion vers l'altitude sélectionnée, une fois qu'un avis de trafic TA a été généré et que le pilote automatique et/ou le directeur de vol sont engagés.
La logique d'activation du TCAP est basée sur l'avis de trafic TA déclenché par le TCAS, qui confirme clairement la présence de trafic à proximité de l'avion.
L'activation du TCAP est totalement transparente pour le pilote qui notera les mêmes changements de mode avec TCAP que sans TCAP. Le cas du TCAP n'a entraîné qu'une réduction plus rapide du taux de descente ou taux de montée.
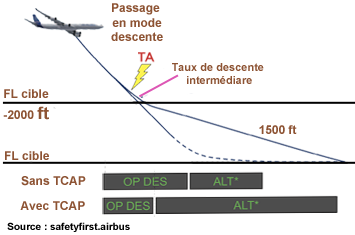
TA précoce en decente
Exemple 1 - L'avion descend en mode OP DES lorsqu'un TA se produit au-dessus des 2000 derniers pieds. Le mode ALT* (capture) s'engage immédiatement avec la loi de contrôle ALT*TCAP active et un facteur de charge verticale associé de 0,1 g : le taux de descente est réduit à une vitesse verticale cible intermédiaire supérieure à 1500 ft/min jusqu'à atteindre les derniers 2000 ft, où la vitesse verticale cible devient 1500 ft/min.
Exemple 2 - L'avion effectue une capture d'altitude sur le profil de capture parabolique classique de 0,05 g (mode ALT*) lorsqu'un TA se produit. La loi ALT*TCAP s'active automatiquement pour réduire rapidement le taux de descente, raccourcissant la parabole avec un facteur de charge verticale de 0,15 g (le mode ALT* reste engagé). Le taux de descente est réduit à une vitesse verticale comprise entre 1200 ft/min et 1500 ft/min en fonction de la distance de l'avion par rapport au niveau de vol cible au moment du TA jusqu'à la fin de la capture.
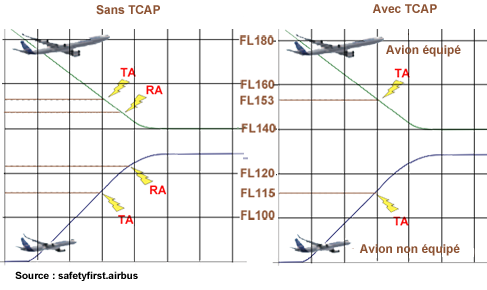
Exemple 3 - L'utilisation du TCAP a permis d'éviter des RA. Étant donné que les RA en palier de 1 000 ft représentent plus de 55 % de toutes les RA, le projet a conclu que le TCAP pourrait réduire de moitié le nombre total de RA d'un aéronef équipé.
Un autre résultat pertinent observé est qu'un seul avion équipé d'un TCAP peut permettre la prévention des RA pour les deux avions. Dessin ci-dessous.
Conflit entre ATC et RA
Les pilotes sont tenus de se conformer à tous les RA, même si les RA sont contraires aux autorisations ou aux instructions de l' ATC, à moins que cela ne mette l'aéronef en danger. Toutefois, le fait de se conformer aux RA peut, dans bien des cas, amener un aéronef à dévier de l'autorisation de l'ATC. Dans ce cas, le contrôleur n'est plus responsable de l'espacement des aéronefs impliqués dans les RA.
D'un autre côté, l'ATC peut nuire à la réaction du pilote aux RA. Si une instruction ATC conflictuelle coïncide avec un RA, le pilote pourrait supposer que l'ATC est pleinement conscient de la situation et fournit la meilleure résolution - mais en réalité, on ne peut pas supposer que l'ATC est au courant du RA avant que le pilote ne le signale. Une fois que le pilote a signalé le RA, l'ATC est tenu de ne pas tenter de modifier la trajectoire de vol de l'avion impliqué dans la rencontre. Par conséquent, le pilote est censé suivre les RA (même si cela ne se produit pas encore toujours dans la pratique).

