
TRAFFIC COLLISION AVOIDANCE SYSTEM
TCAS II
Description technique
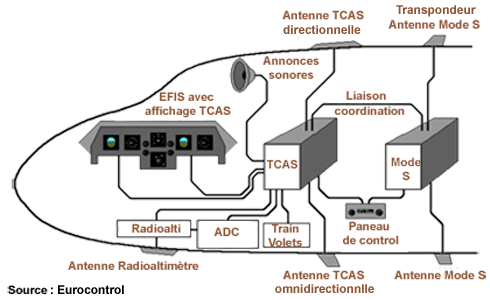
Une installation TCAS II est composée de :
- d’une unité informatique chargée d'élaborer les informations de trafic et d'alerte.
- d’un panneau de commande couplé au transpondeur. Le niveau de capacité de fonctionnement du système TCAS est défini par le pilote à partir du panneau de commande.
- d'un ensemble d'au moins deux antennes directionnelles (une située au-dessus, l'autre au-dessous de l'avion) fonctionnant en UHF (Émission :1030-Réception :1090 Mhz),
- d'un générateur de message audio et visuel (affichage).
Panneau de commande
Un seul panneau de commande permet à l'équipage de sélectionner et de contrôler tous les équipements TCAS, y compris le processeur TCAS, le transpondeur Mode S et, dans certains cas, les affichages TCAS.
Un panneau de commande typique fournit quatre positions de commande de base :
-Stand-by : le processeur TCAS et le transpondeur Mode S sont alimentés, mais le TCAS n'émet aucune interrogation et le transpondeur ne répond qu'aux requêtes discrètes.
-Transpondeur : le transpondeur Mode S est entièrement opérationnel et répondra à toutes les interrogations appropriées au sol et au TCAS. Le TCAS reste en stand-by.
-TA uniquement : le transpondeur Mode S est totalement opérationnel. Le TCAS fonctionnera normalement, émettra les interrogations appropriées et exécutera toutes les fonctions de suivi. Toutefois, le TCAS n'émettra que des TA (avis de trafic) ; les RA (avis de résolution) seront inhibés.
-Automatic ou TA / RA : le transpondeur Mode S est totalement opérationnel. Le TCAS fonctionnera normalement, émettra les interrogations appropriées et exécutera toutes les fonctions de suivi. Le TCAS émettra des TA et des RA, le cas échéant.
Ci-dessous le G6990-40 Dual Mode S ATC/TCAS
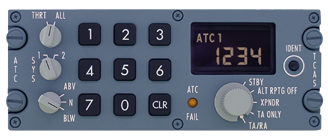
Sur ce panneau de commande, un seul sélecteur rotatif permet à l'équipage de basculer entre plusieurs modes, liés au transpondeur ATC et/ou au TCAS. Lorsque le sélecteur est placé en position TA/RA ou TA ONLY, les deux TCAS et ATC transpondeur fonctionnent. Mais si le sélecteur est placé dans l'une des trois autres positions XPNDR, ALT RPTG OFF, STBY, alors le TCAS est en mode veille. Si le sélecteur est placé sur STBY le TCAS et le transpondeur ATC sont en mode standby (attente).
Composition d'une installation TCAS II
L'unité informatique TCAS assure la surveillance de l'espace aérien, le suivi des intrus, le suivi de l'altitude de l'avion, la détection de la menace, la détermination et la sélection des manœuvres de l'avertisseur RA et la génération d'avis. Le processeur TCAS utilise les entrées d'altitude pression, du radioaltimètre et d'état discret de son propre aéronef pour contrôler les paramètres logiques d'évitement de collision qui déterminent le volume de protection autour du TCAS. Si l'aéronef intrus est également équipé du TCAS II, la manœuvre d'évitement sera coordonnée entre les deux aéronefs.
Schéma simplifié d'une unité informatique TCAS.
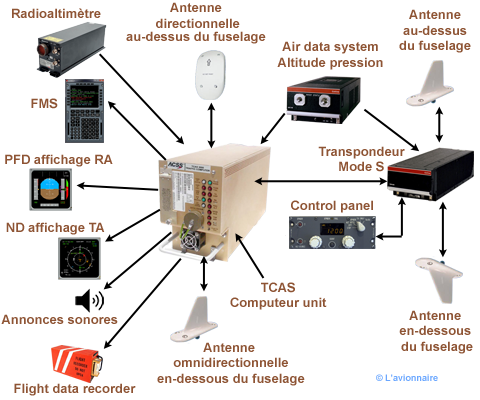
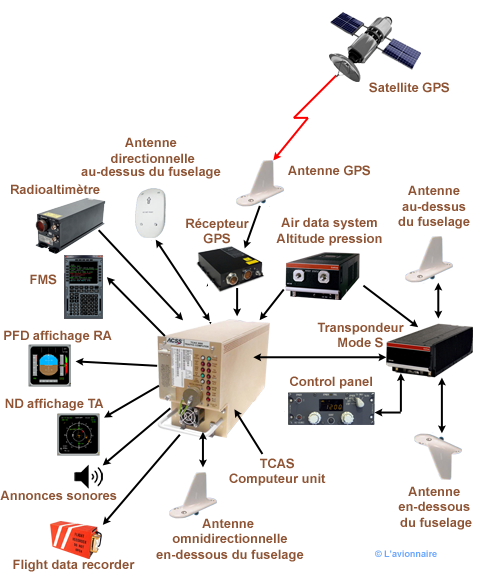
Schéma simplifé du système TCAS avec un système GPS.
Différentes connexions
Connexion avec le transpondeur Mode S
- pour émettre des avis de résolution complémentaires et coordonnés, lorsque les deux avions sont équipés du TCAS II.
Connexion avec l'altimètre
- pour obtenir l'altitude-pression, et/ou avec le calculateur de données aériennes (ADC) embarqué, le cas échéant.
Connexion avec le radioaltimètre
- d'une part, pour inhiber les RA lorsque l'avion se trouve à proximité du sol et, d'autre part, pour déterminer si les avions suivis par le TCAS sont au sol.
Haut-parleurs
- pour les annonces sonores.
Transpondeur Mode S
Un transpondeur Mode S Voir Transpondeur doit être installé et opérationnel pour que le TCAS II soit opérationnel. Si le transpondeur Mode S tombe en panne, l’analyseur de performances du TCAS II le détecte et met automatiquement le TCAS II en veille. Le transpondeur Mode S exécute les fonctions normales pour prendre en charge le système ATC (Air Traffic Control ou Contrôle du trafic aérien en français) au sol et peut fonctionner avec un capteur de terre ATCRBS (Air Traffic Control Radar Beacon System) ou un capteur de Mode S. Le transpondeur Mode S sert également à l'échange de données air-air entre les aéronefs équipés de TCAS, de sorte que des RA complémentaires coordonnés puissent être émis en cas de besoin.
Antennes
Les antennes utilisées par le TCAS II comprennent une antenne directionnelle montée sur le dessus de l'aéronef et une antenne omnidirectionnelle ou directionnelle située au-dessous de l'aéronef.
Ces antennes émettent des interrogations sur 1030 MHz à des niveaux de puissance variables dans chacun des quatre segments d'azimut 90°. Ces antennes reçoivent également les réponses du transpondeur, à 1090 MHz, et envoient ces réponses au processeur TCAS.
Deux autres antennes sont également requises pour le transpondeur Mode S. Une antenne est montée sur le dessus de l'aéronef, tandis que l'autre est montée au-dessous de l'aéronef. Ces antennes permettent au transpondeur Mode S de recevoir des interrogations à 1030 MHz et de répondre aux interrogations reçues à 1090 MHz.
Les nouveaux systèmes intégrés transpondeur-TCAS ne nécessitent que deux antennes partagées par le transpondeur et le TCAS. Comme l'unité TCAS et le transpondeur génèrent chacun des signaux d'émission sur la fréquence de réception de l'autre, le TCAS et le transpondeur sont connectés à un bus de suppression d'avion qui désactive l'un lorsque l'autre émet.
Les fonctions logiques
La logique de l’anti-abordage est une logique prédictive. La théorie du TCAS est basée sur des critères de temps et non de distance. À partir de plusieurs réponses successives, le TCAS calcule le temps jusqu'au point de rapprochement maximal, ou CPA (closest point of approach). Ce temps est le paramètre principal pour la génération des alarmes. Les seuils d’alerte varient en fonction de l’altitude. La logique TCAS travaille sur un cycle d’une seconde. Le test principal du système TCAS est basé sur le temps restant jusqu'au CPA avec des seuils déterminant un TA (Traffic Advisory), un RA (Resolution Advisory), selon la tranche d’altitude de l’avion.
La nature d'un système efficace d'évitement des collisions nécessite de nombreuses conditions spéciales réparties sur l'ensemble des fonctions et qui dépendent de la géométrie de la rencontre, des seuils de distance, de l'altitude et des performances des aéronefs. Ces conditions spéciales dépassent le cadre du présent document.
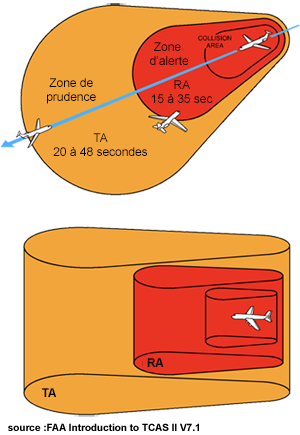
Volume de l'espace
Les zones de collision, d'alerte et de prudence définissent un volume d'espace autour des avions équipés de TCAS/ACAS, (figure ci-dessous). La forme de ces zones est entièrement définie par le temps, et non par la distance. Les limites temporelles changent avec l'altitude et, par conséquent, une valeur unique ne peut pas être donnée. La limite pour un TA est de 20 à 48 secondes ; pour un RA, elle est de 15 à 35 secondes. Le niveau de sensibilité (SL) détermine la limite de temps utilisée à une altitude donnée.
TCAS II version 7.1
La version 7.1 du TCAS est la seule version de l'ACAS répondant aux exigences actuelles des mandats de l'OACI et de l'Europe. Par la suite seul la version 7.1 du TCAS sera étudiée dans ce paragraphe.
La surveillance opérationnelle de la version 7.0 a révélé deux problèmes avec les réponses des pilotes aux RA pour réduire le taux de montée ou le taux de descente. En effet, l'annonce sonore associée au RA pour réduire le taux de montée ou le taux de descente était "Adjust vertical speed, adjust" et ne communiquait pas clairement quelle manœuvre exacte était requise. Cela a conduit à des cas où les pilotes augmentaient leur vitesse verticale plutôt que de la réduire, causant ainsi une détérioration de la situation.
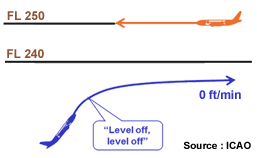
Pour résoudre ces problèmes, dans la version 7.1, les RA de réduction du taux de montée ou de descente ont été remplacés par un nouveau RA "Level off, level off". Le RA "Level off, level off" nécessite une réduction du taux vertical à 0 ft/min . Le niveau de stabilisation doit être atteint rapidement, et pas nécessairement à un niveau de vol standard. (par exemple, FL230, FL240, etc.).
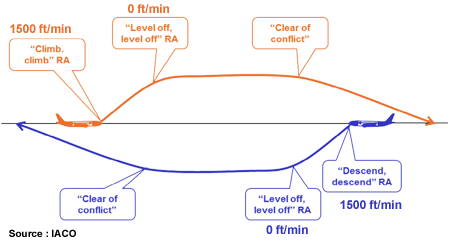
Le RA "Level off, level off" peut être émis en tant que RA initial (comme ci-dessus) ou en tant que RA affaibli (après, par exemple, un Climb,climb ou Descend, descend du RA) lorsque la distance verticale entre les aéronefs augmente après l'annonce du RA initial (comme ci-dessous).
Le message sonore Level off, level off présente l'avantage d'être intuitif et la manœuvre associée correspond à la manœuvre standard de stabilisation.
Après l’introduction de la version 7.0 au début des années 2000, une faiblesse dans la logique d’inversion du sens (Climb, climb NOW ou Decend, descen NOW) a été découverte.
La version 7.1 apporte des améliorations à la logique d'inversion en détectant les situations dans lesquelles, malgré les RA, les avions continuent de converger verticalement. Une fonctionnalité a été ajoutée à la version logique 7.1 qui surveille la conformité de l'autorité d'enregistrement lors de rencontres coordonnées. Lorsque la logique détecte qu'un aéronef ne répond pas correctement à un RA, elle envoie une inversion de RA à l'autre aéronef qui manœuvre conformément au RA (c'est-à-dire «Climb, climb NOW» ou «Descend, descend NOW») et modifie le sens du RA émis pour l'aéronef qui ne répond pas correctement afin qu'il soit compatible avec l'inversion.
Cette fonctionnalité ne sera activée que si :
- il reste au moins 4 secondes, car un RA pour inversion, déclenchée au cours des 4 dernières secondes donne peu de chance à une réponse correcte du pilote.
- et seulement si au moins 10 secondes se sont écoulées depuis le RA initial, car un ordre d'inversion trop rapide ne donne pas suffisamment de temps au pilote pour se conformer au RA initial.
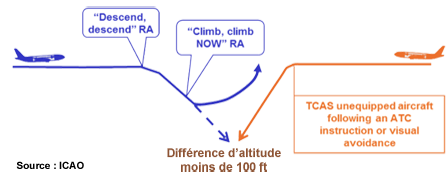
Ci-dessous,inversion du RA
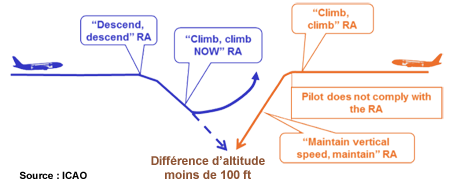
Lors de rencontres, si un seul aéronef est équipé du TCAS II, la version 7.1 reconnaîtra la situation et émettra un RA d'inversion si l'autre avion (intrus) non équipé se déplace dans la même direction verticale que l’appareil équipé du TCAS II.
Bien que le changement de logique d'inversion soit transparent pour les équipages de conduite, il apporte néanmoins des améliorations significatives en matière de sécurité.

