
TRANSPONDEUR et TCAS II
TCAS II
Traffic Advisory TA
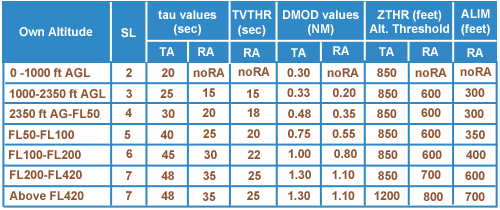
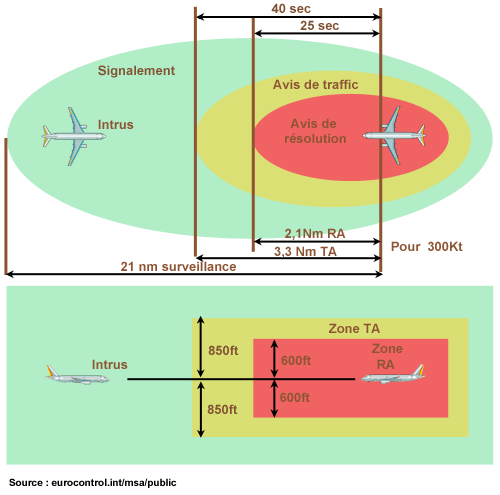
La fonction d'avis de trafic TA utilise un algorithme simplifié, semblable à la logique pour générer des RA, mais avec des seuils d'alerte plus élevés (voir tableau ci-dessous). Les seuils de déclenchement verticaux pour les TA sont de 850 ft au-dessus et au-dessous de l'avion équipé du TCAS au-dessous de FL 420 et de 1 200 ft au-dessus de FL 420.
Un objectif de déclaration de non-altitude générera un TA si le test de portée est satisfaisant et que son propre aéronef est en dessous du FL 155, sur la base des mêmes valeurs du temps d'avertissement associées au TA.
Si un intrus n'est pas la cause d'un TA, mais qu'il se trouve à moins de 6 NM et à plus de 1200 ft de l'aéronef équipé du TCAS, il sera affiché comme un trafic proche.
Seuils d'alertes liés aux altitudes
TCAS-TCAS coordination
Lors d’une rencontre TCAS-TCAS (rencontre entre deux aéronefs équipés de TCAS II), chaque aéronef, une fois qu'un RA a été émis, transmet des " interrogations " à l'autre aéronef par la liaison de données Mode S sous la forme d'un complément consultatif en résolution RAC. L'avion de réception prend note de l'interrogation du RAC, mais ne répond pas. Les RACs sont envoyés afin d'assurer la sélection d'avis de résolution complémentaires en limitant le choix des manœuvres dont dispose le TCAS qui reçoit le RAC. Les interrogations de coordination utilisent les mêmes canaux 1030/1090 MHz que les interrogations de surveillance et sont transmises au moins une fois par seconde par chaque aéronef pendant la durée du RA. Chaque aéronef continue de transmettre les questions de coordination à l'autre tant que l'autre est considéré comme une menace (c'est-à-dire que le RA est actif).
Les interrogations de coordination contiennent des informations sur la manœuvre prévue d'un aéronef par rapport à la menace. Ces informations sont exprimées sous la forme d'un complément : par exemple, si un aéronef a sélectionné un RA “upward-sense”, il transmettra un message à l'autre aéronef menaçant, limitant la sélection des RA de l'autre aéronef à ceux du "downward-sense". L'interrogation de coordination contient également des informations sur la question de savoir si la menace a choisi ou non de sélectionner un RA "Crossing". Après la coordination, chaque unité du TCAS-TCAS sélectionne indépendamment la force du RA en fonction de la géométrie du conflit.
La règle de base pour la sélection des sens dans une rencontre TCAS-TCAS est qu'avant de sélectionner un sens, chaque TCAS doit vérifier s'il a reçu un complément de l'aéronef menaçant indiquant son intention. Si tel est le cas, le TCAS se conforme aux attentes relatives à la menace aérienne. Sinon, le TCAS sélectionne le sens qui correspond le mieux à la géométrie de la rencontre.
Dans la grande majorité des cas, les deux avions se considèrent comme des menaces à des moments légèrement différents dans le temps. La coordination se déroule comme suit : le premier aéronef sélectionne le sens RA, en fonction de la géométrie de la rencontre, et transmet son intention ; le second aéronef sélectionne alors le sens opposé et confirme son intention.
Fonctions de surveillance
La fonction de surveillance permet à un avion équipé d'un TCAS II d'interroger les transpondeurs Mode S et Mode A/C environnants. Il s'agit de déterminer les positions et les altitudes relatives de l'aéronef intrus. Le TCAS II peut suivre simultanément jusqu'à 30 avions, dans une plage nominale de 14 NM pour les cibles Mode A/C et 30 NM pour les cibles Mode S. Dans les mises en œuvre qui permettent l'utilisation du Mode S étendu "squitter" (transmissions spontanées), la portée de surveillance normale peut être augmentée au-delà des 14 NM. Toutefois, cette information n'est pas utilisée à des fins d'évitement des collisions.
Transpondeur Mode S
La surveillance du TCAS II des avions équipés en Mode S est basée sur la fonction d'adresse sélective du transpondeur Mode S. Le TCAS II écoute les "squitter" envoyées une fois par seconde par les transpondeurs Mode S. L'adresse 24 bits Mode S individuelle de l'expéditeur est contenue dans les "squitter". Si un autre aéronef a la même adresse 24 bits que le sien, la route sera ignorée.
Après réception de "squitter", le TCAS II envoie une interrogation Mode S à l'adresse Mode S 24 bits contenue dans le message. Le TCAS II utilise la réponse reçue pour déterminer la portée, le cap et l'altitude de l'avion intrus.
Si l'aéronef est équipé d'un transpondeur Mode S mais ne fournit pas d'information d'altitude, cet aéronef sera suivi comme cible de compte rendu de non-altitude (NAR) en utilisant l'information de distance et de relèvement et il sera affiché sur l'écran de trafic du TCAS, lorsque votre propre aéronef est en dessous du FL155. Ni une étiquette de données ni une flèche de tendance ne seront affichées avec le symbole de trafic pour un intrus qui ne signale pas l'altitude.
Des TA seront générés par rapport à des aéronefs n'ayant pas fait l'objet d'un report d'altitude lorsque le test de portée sera satisfaisant. Les aéronefs qui ne signalent pas leur altitude sont réputés se trouver à la même altitude que votre propre aéronef (c'est-à-dire dans le pire des cas).
Transpondeurs Mode A
Les aéronefs équipés uniquement de transpondeurs Mode A ne sont pas suivis ni détectés par le TCAS, parce que le TCAS, n'interroge pas en Mode A.
Transpondeurs Mode A/C
Le TCAS utilise une interrogation en Mode C modifié pour interroger les transpondeurs en Mode A/C. Ce principe est connu sous le nom d'appel général Mode C uniquement.
Si l'aéronef intrus est équipé d'un transpondeur Mode A/C mais ne fournit pas d'information d'altitude (Mode C), cet aéronef sera suivi comme une cible avec "non report" d'altitude à l'aide d'informations de distance et de relèvement et il sera affiché sur l'écran de trafic du TCAS, lorsque votre propre aéronef est en-dessous du FL155. Ni une étiquette de données ni une flèche de tendance ne seront affichées avec le symbole de trafic pour un intrus qui ne signale pas l'altitude.
Des TA seront générés par rapport à des aéronefs n'ayant pas fait l'objet d'un report d'altitude lorsque le test de portée sera satisfaisant. Les aéronefs qui ne signalent pas leur altitude sont réputés se trouver à la même altitude que votre propre aéronef (c'est-à-dire dans le pire des cas).
Les réponses des transpondeurs en Mode A/C sont suivies en distance, relèvement et altitude. Ces données sont fournies à la logique d'évitement des collisions pour déterminer le besoin d'un TA ou d'un TA.
Lorsqu'une interrogation en Mode C seulement est envoyée par le TCAS, tous les transpondeurs Mode A/C qui la reçoivent répondent. En raison de la durée de la réponse, tous les avions équipés du Mode A/C, à une distance similaire à celle du TCAS émetteur, peuvent produire des réponses qui se chevauchent lorsqu'elles sont reçues par le TCAS. C'est ce qu'on appelle le brouillage synchrone.
Diverses techniques sont employées pour réduire ce phénomène : des algorithmes permettent un décryptage fiable des trois réponses qui se chevauchent.
Limites des interdérences
La fonction de surveillance contient un mécanisme limitant les interférences électromagnétiques dans la bande 1030/1090 MHz. Chaque TCAS II est conçu pour limiter ses propres transmissions. Le TCAS II est capable de compter le nombre d'unités TCAS, dans sa zone de couverture, grâce à la diffusion, toutes les 8 secondes, d'un message de présence TCAS, qui contient l'adresse 24 bits Mode S de l'émetteur. Lorsque le nombre de TCAS augmente, au-delà d'un certain chiffre, le nombre et la puissance des interrogations sont réduits.
De plus, dans les zones de trafic dense à des altitudes inférieures au FL180, le taux d'interrogations, habituellement 1 par seconde, devient 1 par 5 secondes pour les intrus considérés comme non menaçants et au moins 3 NM à partir de votre propre aéronef, et qui ne déclencheraient pas un avertissement dans les 60 secondes suivantes. Ce mécanisme est appelé "surveillance réduite".
Ces techniques de limitation des brouillages visent à éviter la surcharge des transpondeurs due aux niveaux élevés d'interrogations de son propre TCAS et aux réponses aux interrogations d'autres TCAS. Par conséquent, dans les espaces aériens à très haute densité, la portée de surveillance du TCAS pourrait être réduite à 5 NM.
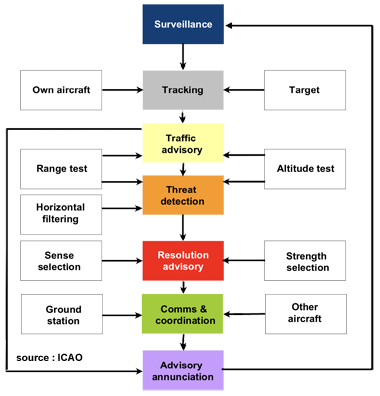
Fonctions CAS
En fonctionnement normal, la logique d'évitement des collisions, ou logique CAS (Collision Avoidance System) fonctionne sur un cycle d'une seconde. Ces fonctions logiques CAS utilisées pour effectuer la tâche d'évitement des collisions sont illustrées ci-dessous.
Cette logique d'évitement des collisions est basée sur deux concepts de base :
- le niveau de sensibilité ;
- le temps d'avertissement.
Bien que les paramètres CAS soient strictement définis, la complexité de la logique d'évitement des collisions rend difficile la prédiction du comportement exact en temps réel.
Le niveau de sensibilité est fonction de l'altitude et définit le niveau de protection. La sensibilité est plus grande (c'est-à-dire que le temps d'avertissement est plus long) à une altitude plus élevée. Le temps d'avertissement est principalement basé sur le temps restant estimé (et non sur la distance à parcourir) jusqu'au point d'approche le plus proche CPA.
Ci-dessous les volumes de surveillance horonzontale et verticale entre 5000 ft et 10 000 ft
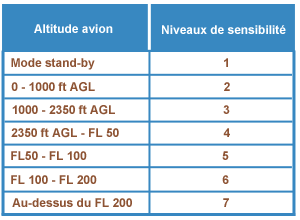
Niveaux de sensibilité
La logique CAS convertit les modes en niveaux de sensibilité comme suit :
- mode STAND-BY sélectionné par le pilote, l'équipement du TCAS ne transmet pas les interrogations. Normalement, ce mode est utilisé lorsque l'avion est au sol ou lorsqu'il y a un mauvais fonctionnement du système.
- mode TA-ONLY, le TCAS assure la fonction de surveillance. Toutefois, seuls les TA sont fournis. L'équipement ne fournit pas de RA. Un aéronef TA-ONLY sera considéré comme non équipé par les autres aéronefs de TCAS.
- mode "AUTOMATIQUE" ou TA/RA, le TCAS sélectionne automatiquement le SL (niveau de sensibilité) en fonction de l'altitude actuelle de son avion. SL2 est sélectionné lorsque l'avion TCAS se trouve entre 0 et 1000 ft AGL (au-dessus du sol) indiqué par le radioaltimètre. Ce SL correspond au mode TA-ONLY. Dans les niveaux 3 à 7, les TA et les RA sont fournis. Pour déterminer le niveau de sensibilité requis au-dessus de 2600 ft AGL, la logique utilise l'altitude-pression standard (calage altimétrique 1013,25 hPa) indiquée par l'altimètre barométrique.
Ci-dessous : Tableau indiquant le seuil d'altitude auquel le TCAS change automatiquement le SL.
Fonctionnement à basse altitude
La logique CAS utilise les données de l'altimètre barométrique et du radioaltimètre ou radiosonde de l'avion à basse altitude. De cette façon, il détermine son altitude, sa vitesse verticale, l'altitude relative et la vitesse verticale de chaque cible.
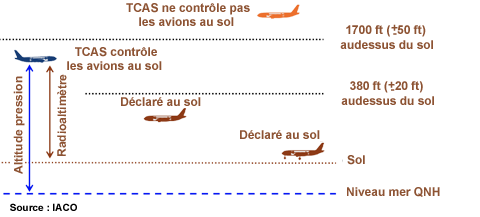
Lorsque l'avion se trouve au-dessous de 1700 ft (±50 ft) AGL, la logique CAS estime l'altitude de l'intrus au-dessus du sol, en utilisant sa propre altitude pression, son propre radioaltimètre et l'altitude pression de l'intrus. Si cette altitude estimée est inférieure à 380 ft (±20 ft), le TCAS II considère que la cible est au sol et ne produit donc ni de TA ni de RA (dessin ci-dessous). Les aéronefs en Mode S qui se déclarent être au sol ne sont pas suivis par le TCAS II.
Délais d'avertissement
Le TCAS II fonctionne sur des délais de temps relativement courts. Le temps maximal pour générer un TA est de 48 secondes avant le CPA. Pour un RA, le temps est de 35 secondes. Les délais sont plus courts à basse altitude. Des manœuvres imprévues ou soudaines de l'avion peuvent entraîner des délais inférieurs pour un RA. Il est même possible qu'un RA ne soit pas précédé d'un TA si une menace est imminente.

