
TRAIN D'ATTERRISSAGE
VERS LE TOUT ÉLECTRIQUE
Introduction
Les progrès en électronique de puissance permettent des conversions d’énergie électriques très fiables et très performantes. Les actionneurs électriques actuels associés à leur électronique de puissance offrent une grande souplesse de contrôle. La génération, la distribution et l’utilisation de l’énergie électrique sont plus aisées, car elle est plus facilement maîtrisable que l’énergie hydraulique ou pneumatique. Mais l’objectif principal reste la réduction de la masse globale de l’avion.
Les freins électriques
Le frein électrique, apporte aujourd’hui, une avancée technologique importante et ouvre la voie vers l’avion « tout électrique ». Un système contrôlé par l’électricité présente de nombreux avantages : délais de livraisons plus courts, gain de poids, baisse de la consommation, coûts de maintenance réduits et plus grande disponibilité de l’avion.
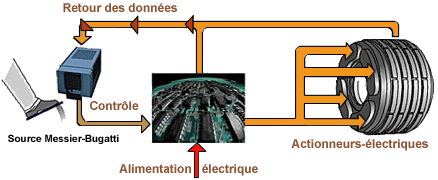
Avec les freins électriques, les équipements hydrauliques sont remplacés par des boîtiers électroniques et les pistons hydrauliques par des actionneurs électro-mécaniques. Ainsi, lorsque le pilote freine, c’est un calculateur qui envoie l’information à un boîtier de commande, qui transforme l’information électrique en un effort électro-mécanique : les actionneurs placés sur la couronne de frein, qui remplacent les pistons hydrauliques, serrent alors les disques de carbone les uns contre les autres comme dans le freinage hydraulique traditionnel. L'information sur la force appliquée est renvoyée au calculateur.
Schéma de fonctionnement d'un frein électrique.
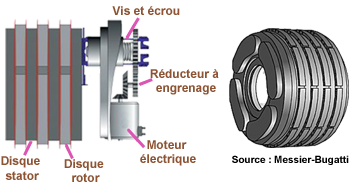
Actionneurs électro-mécaniques en fonctionnement:
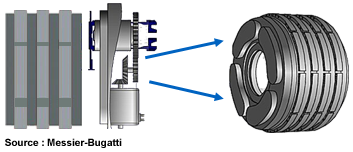
Actionneurs électro-mécaniques hors fonctionnement :
Ci-dessous les freins électriques équipant le Boeing 787 Dreamliner

Source: Messier-Bugatti-Dowty groupe Safran
Roulage autonome électrique
Toutes les phases de roulement au sol, de l'aérogare à l'entrée de piste pour le décollage et après atterrissage de la piste à l'aérogare sont faites avec les moteurs courants (turboréacteurs) alors qu'ils ne sont pas conçus pour cette fonction. Un système électrique pourrait économiser du carburant et servir également à reculer l'avion pour éviter un tractage (Push-Back).
La question était de savoir si un avion de transport de passagers peut se déplacer de façon autonome au sol sans ses moteurs. La vitesse d'un avion de transport de passagers comme Airbus A320 est d'environ 25 km/h et le poids peut atteindre 80 T.
Dans ce projet un système de pile à combustible fournit l'approvisionnement énergétique pour le moteur. Il est placé dans la zone de cargaison arrière et ne produit que de l'eau comme milieu liquide d'échappement. Cette eau pourrait être récupérée pour les toilettes. Ce comportement multifonctionnel est la raison d'employer des piles à combustible au lieu des batteries.
Ou placer ce moteur ? Le train d'atterrissage principal avec les freins à l'intérieur des roues, ne fournit pas assez d'espace pour un moteur électrique. Par conséquent, l'espace dans le train d'atterrissage avant pour d'installation sera employé. Un moteur électrique de moyeu de roue qui peut être facilement placé sur l'axe du train d'atterrissage avant a été monté sur Airbus A320.
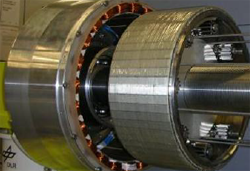
Ci-dessous le rotor du moteur électrique qui porte les aimants permanents.
Ci-dessous le train avant de A320 équipé de deux moteurs électriques

Le but du développement était de démontrer la faisabilité d'une telle commande. Les divers essais ont prouvé que les deux moteurs du train d'atterrissage avant pouvaient déplacer l'avion au sol avec une pente jusqu'à 1.5 %.
Source: Electric Whell Hub Motor for Aircraft Application - 2011
Michael Schier, Frank Rinderknecht, Heribert Hellstern
EGTS
Le système EGTS est actuellement développé par Messier-Bugatti-Dowty du groupe Safran, et contrairement au projet ci-dessus, les moteurs électriques situés dans les roues principales sont alimentés par le groupe auxiliaire de bord (APU). EGTS permet à des avions de rouler au sol et de reculer entièrement de façon autonome sans exiger l'utilisation des moteurs d'avions. Deux des roues principales sont équipées d'un moteur électrique tandis que les contrôleurs uniques de l'électronique de puissance et de système donnent aux pilotes le contrôle total de la vitesse de l'avion et la direction pendant les opérations de roulage.
Le groupe Safran estime à 75 % les réductions des émissions de carbone et de 50 % les émissions de NOx pendant les opérations de roulage au sol sur un aéroport.
Depuis 2011, associé à Honeywell, Safran prévoit que le système EGTS pourra accélérer un avion à environ 20Kt en 90sec à la masse de décollage maximale (MTOW). Le système devra être également capable d'accélérer à 10kt en 20sec pour la traversée des pistes actives ou croisées et de rouler sur une pente de 1,5 % à MTOW.
Ci-dessous l'atterrisseur principal d'un A320 équipé du système EGTS

Source: Messier-Bugatti-Dowty groupe Safran
Orientation de la roue avant
La notion" Plus Electric Aircraft" implique la migration des systèmes d'alimentation hydraulique, pneumatique et mécanique par un système d'alimentation électrique. Dans le cas de la direction de roue avant, le remplacement du circuit hydraulique conventionnel par une alternative électromécanique suit cette philosophie du plus électrique, tout en réduisant le poids et la complexité des circuits ainsi que la sécurité en diminuant les risques hydrauliques.
Les conditions de fabrication spécifient que la direction de roue avant doit demeurer opérationnelle suivant n'importe quel défaut électrique simple. Plutôt qu'une exigence de sécurité, ceci est spécifié pour permettre aux avions de revenir au parking ou au hangar par leurs propres moyens pour y effectuer les réparations.
Pour prévoir une défaillance unique des enroulements du moteur, du régulateur électronique de puissance, des capteurs, de l'alimentation ou des signaux de commande, un moteur électrique à double circuit a été développé. Le couple complet peut être fourni par la "moitié" du moteur en cas de défaillance.
Ci-dessous le moteur, la boîte de vitesses et l'embrayage développé par Goodrich Actuation Systems.
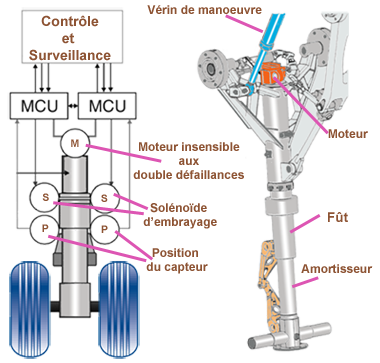
Le moteur est alimenté par deux circuits indépendants qui partagent leurs informations.

Ce projet d'orientation de la roue avant n'est actuellement qu'au stade de prototype, et des recherches sont encore nécessaires en cas de divergence des doubles circuits.
Source: Fault-tolerant electric drive for an aircraft nose
wheel steering actuator- 2011
J.W. Bennett1 B.C. Mecrow1 D.J. Atkinson1 C. Maxwell2 M. Benarous2
![]()
