
AIRES DE PROTECTION DES PROCÉDURES
AIRES DE PROTECTION AU DÉCOLLAGE
Compte tenu du caractère évolutif des éléments de ce chapitre, le pilote devra s'assurer, avant d'effectuer son vol ou passer un examen que ces informations ne sont pas modifiées. Le responsable de ce site décline expressément toute garantie, expresse ou implicite, concernant ce document.
- Procédure de Départ
- Départ en ligne droite
- Départ en virage
- Départs omnidirectionnels
Introduction
Une procédure de départ prévoit une marge de franchissement d’obstacles immédiatement après le décollage, jusqu’à ce que l’aéronef intercepte un segment en route. Les procédures de départ incluent, sans s’y limiter, des routes de départ normalisé et les procédures correspondantes. Une procédure de départ n'est pas déterminée uniquement en fonction des impératifs de franchissement d’obstacles, mais peut aussi être requise pour des motifs de contrôle de la circulation aérienne, de gestion de l’espace aérien et d’autres raisons (par exemple atténuation du bruit).
Procédure de départ
Début de la procédure de départ
Dans le cas des avions, la procédure de départ commence à l’extrémité départ de la piste DER, qui correspond à l’extrémité de l’aire déclarée adéquate pour le décollage (c’est-à-dire l’extrémité de la piste ou, le cas échéant, du prolongement dégagé).
Étant donné que le point d’envol varie, et afin de protéger les virages avant la DER, l’aire protégée commence en un point situé à 600 m du début de la piste. Cela est basé sur l’hypothèse que la hauteur minimale de virage à 120 m (394 ft) au-dessus de l’altitude topographique de la DER pourrait être atteinte à 600 m du début de la piste, toutefois, pour les aéronefs de catégories A ou B, une hauteur inférieure peut être adoptée, en cas de nécessité, à condition qu’elle reste supérieure ou égale à 90 m (295 ft).
L’étude du franchissement des obstacles associée à la procédure de départ prend fin au point où la pente de calcul de procédure PDG atteint l’altitude/hauteur minimale autorisée pour la phase de vol suivante (en route, attente ou approche).
Note : L’altitude topographique de la DER est l’altitude de l’extrémité de la piste, ou l’altitude de l’extrémité du prolongement dégagé si cette dernière est plus élevée.
Marge minimale de franchissement des obstacles
La marge minimale de franchissement d’obstacles MFO dans l’aire primaire est de 0,8 % de la distance parcourue depuis la DER. La MFO est égale à zéro à la DER.
Lorsque des obstacles situés dans l’aire de protection sont jugés trop importants, il peut être décidé de modifier la trajectoire de telle sorte que l’aire de protection ne les englobe plus ; la procédure doit assurer le franchissement des obstacles restants situés dans l’aire de protection avec une marge de franchissement d’obstacles MFO.
En plus de ce qui précède, avant le commencement d’un virage de plus de 15°, une MFO définie est requise.
Pente de calcul de procédure
La pente de calcul de procédure PDG est la pente de montée publiée, mesurée à partir de 5 m (16 ft) au-dessus de la DER. La valeur minimale de la PDG est 3,3 %.
La route de départ est ajustée pour obtenir la PDG minimale. Si cela n’est pas possible, la PDG peut être augmentée pour procurer la marge minimale de franchissement d’obstacles au-dessus des obstacles 0,8 % de la distance depuis la DER. (Voir dessin ci-dessous)
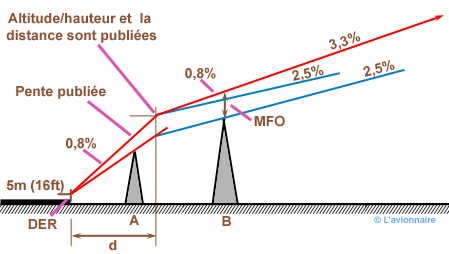
Sur le dessin ci-dessus la présence de l'obstacle B ne permet pas de réduire la pente à 3,3 % (2,5+ 0,8) juste après le franchissement de l'obstacle A.
Une PDG dépassant 3,3 % ainsi que l’altitude jusqu’à laquelle s’étend la pente augmentée sont publiées ainsi que l’obstacle déterminant cette pente.
Deux cas peuvent se présenter :
a - la PDG résultant de la prise en compte d’obstacles très proches de la DER est très élevée (supérieure à 15 %) : elle n’est pas publiée. Dans ce cas, une nouvelle PDG est calculée en faisant abstraction de ces obstacles. Cette nouvelle pente est publiée avec une mention décrivant les obstacles non pris en compte (position, cote au sommet) ainsi que l’obstacle le plus pénalisant qui la détermine.
b - la PDG est élevée (supérieure à 3,3 %) : elle est publiée ainsi que l’obstacle déterminant cette pente. Dans le cas où cet obstacle est isolé et que cela représente un intérêt opérationnel, une deuxième pente faisant abstraction de cet obstacle peut être publiée ; l’obstacle le plus pénalisant imposant cette deuxième pente est également publié si cette dernière est supérieure à 3,3 %.
Si la PDG est augmentée, elle est ramenée à 3,3% au point situé au-delà de l’obstacle critique où peut être assurée la marge de franchissement d’obstacles de 0,8 % de la distance depuis la DER. (Voir dessin ci-dessus)
Lorsqu’il y a un DME convenablement situé, ou lorsque des repères RNAV convenablement situés peuvent être établis, des informations additionnelles de hauteur/distance, destinées à permettre d’éviter les obstacles, sont publiées pour procurer un moyen de contrôler la position des aéronefs par rapport aux obstacles critiques.
Route de départ
Il y a deux types fondamentaux de routes de départ : en ligne droite et avec virage.
Le guidage sur trajectoire est fourni :
a - au plus tard 10,8 NM après l’extrémité départ de la piste DER dans le cas des départs en ligne droite ;
b - au plus tard 5,4 NM après exécution des virages dans le cas des départs avec virage.
Le radar de surveillance peut être utilisé pour le guidage sur trajectoire.

Départ en ligne droite
Un départ dans lequel la trajectoire initiale de départ se trouve à 15° maximum de l’alignement de l’axe de piste est un départ en ligne droite. Si possible, la trajectoire de départ est dans le prolongement de l’axe de piste.
Les départs en ligne droite se divisent en deux grandes catégories, selon la disponibilité d’un guidage sur trajectoire initiale :
a - départ en ligne droite sans guidage sur trajectoire :
1 - départ sans ajustement de trajectoire ;
2 - départ avec ajustement de trajectoire (point d’ajustement de trajectoire non spécifié) ;
3 - départ avec ajustement de trajectoire (point d’ajustement de trajectoire spécifié) ;
b - départ en ligne droite avec guidage sur trajectoire :
1 - installation en avant ou en arrière ;
2 - avec décalage (trajectoire en parallèle/trajectoire en décalage/trajectoire sécante).
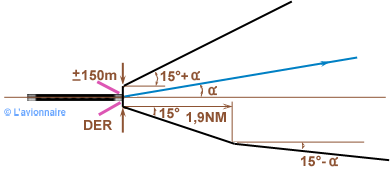
Dans la construction des aires, il est présupposé que tout ajustement de trajectoire s’effectue, à une distance de la DER qui n’excède pas 1.9 NM, ou en un point spécifié d’ajustement de trajectoire.
Départ en ligne droite sans guidage sur trajectoire
Départ sans ajustement de trajectoire
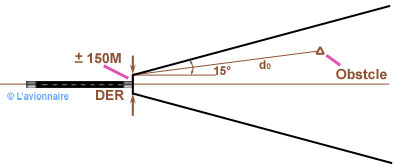
L’aire commence à la DER et a une largeur initiale de 300 m. Elle est centrée sur l’axe de piste et s’évase sous un angle de 15° de part et d’autre du prolongement de l’axe de piste.
L’aire se termine à la fin de la procédure de départ c'est-à-dire au point où la PDG atteint l’altitude/hauteur minimale autorisée pour la phase de vol suivante (en route, attente ou approche).
Départ avec ajustement de trajectoire
La trajectoire initiale de départ peut être ajustée de 15° ou moins. Lorsqu’elle est ajustée, l’évasement de la limite de l’aire sur le côté de l’ajustement de trajectoire est augmenté de l’angle d’ajustement de trajectoire, à partir de la DER.
Sur le côté opposé de l’ajustement de trajectoire, la limite est ajustée de la même quantité en un point situé à une distance de la DER égale à 1,9 NM
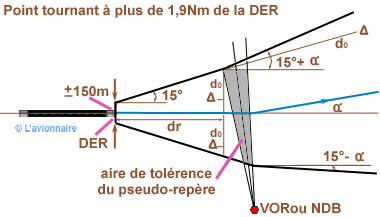
Point d’ajustement de trajectoire spécifié.
Si un point d’ajustement de trajectoire est spécifié :
a - l’évasement de la limite de l’aire sur le côté de l’ajustement de trajectoire est augmenté de l’angle d’ajustement de trajectoire, à partir de la tolérance amont du point d’ajustement de trajectoire ;
b - l’évasement de la limite de l’aire sur le côté opposé à l’ajustement de trajectoire est diminué de l’angle d’ajustement de trajectoire, à partir de la tolérance aval du point d’ajustement de trajectoire.
Départ en ligne droite avec guidage sur trajectoire
L’aire se construit comme un départ en ligne droite sans guidage sur trajectoire, et s’étend jusqu’au point où les limites coupent l’aire associée à l’aide de navigation qui procure le guidage sur trajectoire.
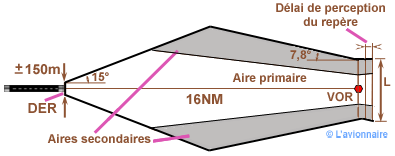
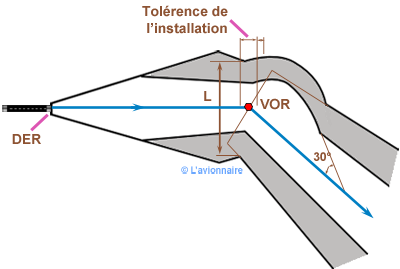
Lorsque le VOR ou le NDB servant au guidage est installé sur l’aérodrome ou en amont de celui-ci, la trajectoire de départ ou son prolongement doit passer à un maximum de 300 m latéralement par rapport à l’axe de piste à la DER.
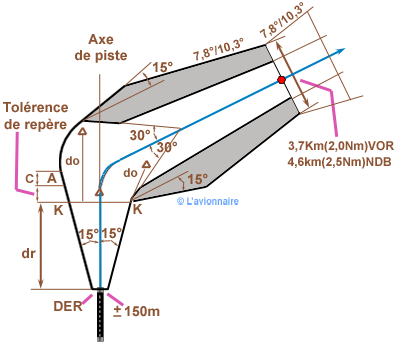
Pour la construction de l’aire associée au guidage à l'aide d'un VOR ou d'un NDB, on considère une largeur L au travers de l’installation, qui est fonction de la distance d de celle-ci par rapport à la DER, mesurée sur la trajectoire nominale de départ.
a - Pour un VOR :
L = plus grande des deux valeurs : 2 NM ou 0,15.D (L et D en NM)
Pour un NDB :
L = plus grande des deux valeurs : 2,5 NM ou 0,22.D (L et D en NM)
L’aire s’évase à 7,8° pour un VOR et 10,3° pour un NDB ; lorsque sa largeur atteint 10 NM, elle conserve ensuite cette valeur.
Le principe général de l’aire secondaire s’applique.
Ci-dessous cas d'un guidage assuré par l'aide d'un VOR dans l'axe de la piste.
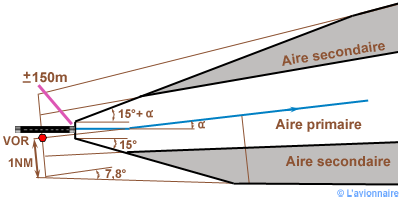
Ci-dessous cas d'un guidage assuré par l'aide d'un VOR positionné sur l'aérodrome.
Départ en virage
Un départ comportant un virage de plus de 15° est un départ avec virage. Les virages peuvent être spécifiés à une altitude/hauteur, à un repère ou à une installation.
Le vol en ligne droite est présupposé jusqu’à ce que soit atteinte une hauteur d’au moins 120 m (394 ft) au-dessus de l’altitude de la DER . Toutefois, pour les aéronefs de catégories A ou B, une hauteur inférieure peut être adoptée, en cas de nécessité, à condition qu’elle reste supérieure ou égale à 90 m (295 ft) .
Les aires prises en compte dans la conception de départs avec virage se définissent comme :
a - l’aire de mise en virage ;
b - l’aire de virage.
L’aire de mise en virage est une aire dans laquelle l’aéronef exécute une montée en ligne droite afin d’atteindre la MFO requise avant le commencement d’un virage.
L’aire de virage est l’aire dans laquelle l’aéronef est considéré comme étant en virage.
On distingue deux types de virage :
1 - le virage initial entrepris à une hauteur inférieure ou égale à 300 m (984 ft) au-dessus du niveau de la DER, dans le cas d'un virage à une altitude/hauteur, ou à un TP désigné situé à une distance inférieure ou égale à 3,2 NM de la DER ,
2 - le virage après montée initiale, entrepris à une hauteur supérieure à 300 m (984 ft) au-dessus du niveau de la DER , dans le cas d'un virage à une altitude/hauteur ou à un TP désigné situé à une distance supérieure à 3,2 NM de la DER.
Paramètres de virage
Les paramètres sur lesquels sont basées les aires de virage sont les suivants :
Vitesse : vitesse propre calculée à partir de la vitesse indiquée maximale mentionnée dans le tableau des vitesses maximales indiquées, pour :
altitude :
1- dans le cas d’un virage désigné à une altitude/hauteur : altitude de virage ;
2 - dans le cas d’un virage à un point de virage désigné : altitude de l’aérodrome majorée de la hauteur acquise en se fondant sur une montée de 10 % depuis la DER jusqu’au point de virage ;
température : ATI + 15°.
Aucune réduction de vitesse n'est admise pour le virage initial. En cas de nécessité opérationnelle, les valeurs de vitesse maximale en virage après montée initiale peuvent être réduites, à condition qu'elles restent supérieures à celles d'un virage initial. Dans ce cas, la limitation de vitesse est publiée.
Tableau des catégories d'aéronefs et des vitesses maximales indiquées en Kt (noeuds)
| Catégorie d'aéronefs | Virage initial | Virage après montée initiale |
| A | 120 | 120 |
| B | 145 | 165 |
| C | 175 | 265 |
| D | 205 | 290 |
| E | 255 | 305 |
vent :
virage initial :
10 kt pour les calculs de tolérance de vol
30 kt pour les calculs de spirale de vent ;
virage après montée initiale : vent à l'altitude du virage :
1,5h + 36 en France métropolitaine
2h + 47 en outre-mer.
Lorsque des statistiques météorologiques suffisantes sont disponibles, un vent statistique à 95 % sur une base omnidirectionnelle peut être adopté.
angle d'inclinaison :
virage initial : 15°
virage après départ initial : 25° ou vitesse angulaire de 3°/s si l'inclinaison est inférieure à 25°.
tolérance de repère : selon le type de repère
tolérances techniques de vol :
virage initial :
c = 6 s (3 s : délai de perception + 3 s : délai de mise en virage)
virage après départ initial :
c = 11 s (6 s : délai de perception + 5 s : délai de mise en virage).
Aire de mise en virage
L’aire de mise en virage commence en un point situé à 600 m du début de la piste.
L’aire de mise en virage se termine au TP. Le TP peut être défini par :
a - la tolérance amont de repère du repère de TP (virage en un point de virage désigné) ; ou
b - la position à laquelle la PDG atteint l’altitude/hauteur de virage spécifiée.
L’aire de mise en virage est identique à l’aire associée à un départ en ligne droite sans guidage sur trajectoire.
Virage à une altitude/hauteur spécifiée
Un virage peut être prescrit en un point où est atteinte une altitude/hauteur spécifiée pour prendre en compte la situation dans laquelle il y a :
a - un obstacle, situé dans la direction du départ en ligne droite, qu’il faut éviter ; et/ou
b - un obstacle, situé par le travers de la trajectoire de départ en ligne droite, qu’il faut survoler après le virage.
L’altitude/hauteur de virage est choisie de manière à obtenir un point de virage permettant à l’aéronef d’éviter l’obstacle situé droit devant ou de survoler l’obstacle situé par le travers avec la MFO requise. La hauteur de virage (TNH) se calcule par la formule :
TNH = dr.PDG + 5 m (16 ft)
où : dr est la distance horizontale entre la DER et le TP en m
PDG est la pente de calcul de procédure.
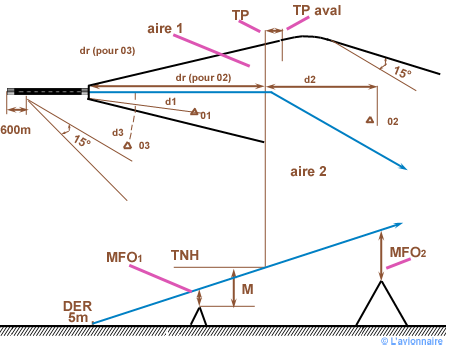
La marge minimale de franchissement d’obstacles dans l’aire de mise en virage se calcule à l’aide de la distance horizontale à partir de la DER, mesurée le long de la trajectoire nominale, à la PDG de calcul.
La marge minimale de franchissement d’obstacles dans l’aire de virage se calcule de la façon suivante :
1 - obstacles situés avant le TP
2 - Obstacles situés après le TP
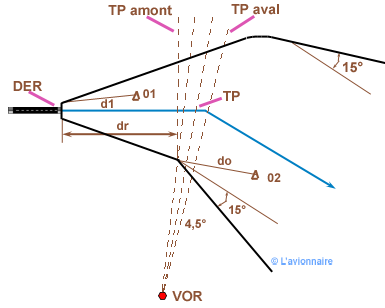
Virage à un TP désigne
Un TP désigné est choisi pour permettre à l’aéronef d’éviter un obstacle situé droit devant. Les critères de départ en ligne droite s’appliquent jusqu’au TP amont.
Les limites longitudinales de la tolérance de TP sont :
a - limite amont : la fin de l’aire de mise en virage ;
b - limite aval déterminée par les éléments suivants :
1 - tolérance de repère de virage ;
2 - tolérance technique de vol calculé conformément au paramètres de virage. Voir Paramètres virage
Virage à un point de repère
La mise en virage s'effectue pour s'aligner sur un radial VOR ou NDB .
Virage à la verticale d'un installation
Dans ce cas le TP est défini par le passage au-dessus d’une aide de navigation, la tolérance de repère se calcule à l’altitude de la DER plus 10 % de la distance entre la DER et le TP.
Départs omnidirectionnels
Sur de nombreux aérodromes, une route de départ n’est pas requise à des fins ATC ni pour éviter certains obstacles. Néanmoins, il peut y avoir au voisinage de l’aérodrome des obstacles ayant une incidence sur les départs, et une procédure de départ omnidirectionnel est un moyen commode et souple d’assurer le franchissement d’obstacles.
On distingue deux types de départs omnidirectionnels : Type A : et Type B :
Aires de protection
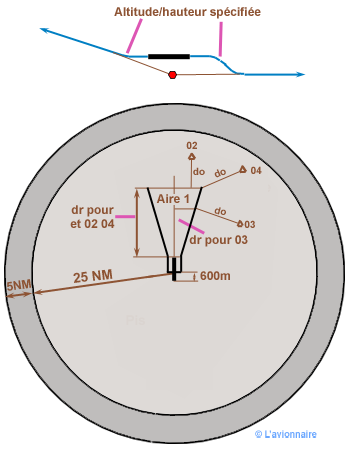
Aire de mise en virage Aire 1
Les critères en ligne droite s'appliquent jusqu'au TP (aire de mise en virage)
Aire de virage Aire 2
Cette aire 2 s'étend depuis les limites de l'aire de mise en virage, jusqu'à un cercle de rayon 25 NM centré sur l'aérodrome (point milieu de la piste). Une zone tampon de 5 NM entourant ce cercle est considérée pour la détermination, des obstacles à prendre en compte.
En région montagneuse, le rayon de ce cercle peut être augmenté si nécessaire, la valeur considérée étant, dans tous les cas, publiée.
Départ omnidirectionnel Type A
Départ en ligne droite suivant une route spécifiée jusqu'à une altitude/hauteur spécifiée à partir de laquelle on peut effectuer un départ omnidirectionnel ou par secteur.
Un secteur ou des secteurs à éviter peuvent être prévus à l'intérieur desquels des PDG différentes sont publiées (au plus égales à la PDG calculée dans l'aire de mise en virage) ; dans ce dernier cas, la limite des deux secteurs coïncide avec l'axe de piste (par exemple, si la PDG dans l'aire de mise en virage est de 5 % , on peut avoir deux secteurs, l'un avec une pente de 5 %, l'autre avec une pente de 3,3 % ).
Chaque secteur est entouré d'une zone tampon.
Départ omnidirectionnel Type B
Départ suivant une trajectoire spécifiée jusqu'à un repère, puis départ omnidirectionnel ou par secteur.
On détermine l'altitude/hauteur la plus basse pouvant être atteinte au repère pour l'ensemble des trajectoires possibles en considérant la pente p associée à la première phase de la procédure (PDG calculée jusqu'au passage du repère).
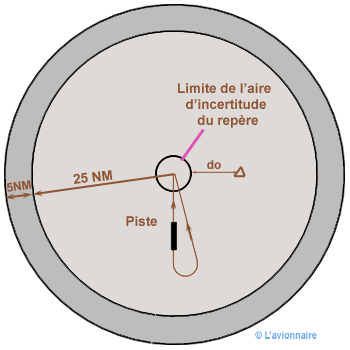
Un secteur ou des secteurs à éviter peuvent être prévus à l'intérieur desquels des PDG différentes sont publiées (au plus égales à la PDG calculée jusqu'au passage du repère). Chaque secteur est entouré d'une zone tampon de 5 NM de large.
![]()