
INSTRUMENTS DE NAVIGATION
CENTRALE À GYROMÈTRE LASER
Centrale à gyrolaser
Chaque centrale à gyrolaser IRU (en anglais Inertial Reference Units) contient trois gyroscopes à laser et trois accéléromètres. Ce système est appelé strapdown car ses capteurs sont directement liés à la structure.
Les accéléromètres et les gyroscopes à laser sont positionnés dans les unités de référence inertielles de façon à être orientés le long de chacun des trois axes de l'avion (Roulis, tangage et lacet). Cette orientation permet à l'IRU de détecter les accélérations le long et autour (rotation) de chacun des trois axes.
Principe effet Sagnac
Un gyromètre laser ou gyrolaser est un capteur de vitesse angulaire (gyromètre) basé sur l'effet Sagnac et mettant en œuvre un rayon laser.
On appelle effet Sagnac le décalage temporel de la réception de deux signaux lumineux tournant en sens inverse autour de la circonférence d'un disque en rotation (par rapport à un référentiel inertiel), quand ils sont émis par un émetteur-récepteur fixé sur ce disque. L'effet Sagnac a été découvert par Georges Sagnac en 1913. En physique classique, il est interprétable comme une asymétrie de la vitesse des signaux lumineux par rapport à la circonférence du disque en rotation. En physique relativiste, l'effet correspond à l'impossibilité de synchroniser des horloges sur une courbe fermée soumise à la gravitation, ou à une accélération (en cas de rotation). Source wikipédia.org
Le laser acronyme de l'anglais (Light Amplification by Stimulated Emission of RadiationDispositif) est un dispositif qui amplifie la lumière et la rassemble en un étroit faisceau, dit cohérent, où ondes et photons associés se propagent en phase, au lieu d'être arbitrairement distribués. Cette propriété rend la lumière laser extrêmement directionnelle et d'une grande pureté spectrale. Source www.futura-sciences.com
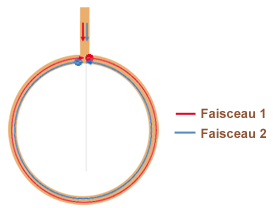
Ci-dessous un émetteur émet des photons autour d'un disque dans des sens opposés et dans circuit fermé. Comme le circuit est immobile les photons reviennent en même temps au point de départ.
Ci-dessous un émetteur émet des photons autour d'un disque dans des sens opposés et dans circuit fermé et mobile. Comme le circuit a tourné les photons reviennent décalé temporellement au point de départ.
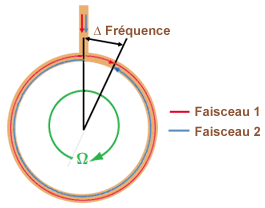
La différence est proportionnelle à la vitesse d'entrée Ω et à la surface S englobée par le parcours des photons. ∆F = 4 S Ω / C.
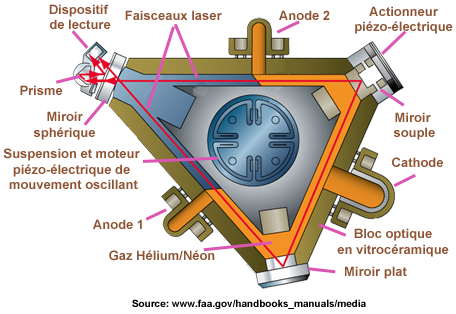
Principe de fonctionnement du gyrolaser
Dans les gyrolasers en anneau, la masse rotative du gyroscope conventionnel est remplacée par deux faisceaux lumineux contrarotatifs. Le corps principal du gyrolaser est constitué d'un seul bloc optique généralement en Zérodur® (vitrocéramique) à faible coefficient de dilatation en forme triangulaire ou carrée. Le bloc optique comporte des tubes capillaires remplis d’un mélange gazeux (hélium/néon) qui constitue le milieu amplificateur du laser. Un miroir est placé à chaque coin, formant un chemin de résonateur optique triangulaire. Le premier miroir est concave pour améliorer la focalisation, le deuxième est fixé sur un actionneur piézoélectrique ce qui va permettre de moduler la puissance du laser et le troisième est semi-réfléchissant, ce qui permet de récupérer une partie du faisceau. Une tension élevée (environ 1 kV) est appliquée entre la cathode et les deux anodes, ce qui provoque une décharge. La décharge fournit une alimentation haute tension permettant d'avoir la densité d'électrons pour créer un gain suffisant dans les tubes capillaires.
En fait, il existe deux lasers à l'intérieur de la même cavité :
- un faisceau dans le sens horaire,
- un faisceau dans le sens anti-horaire.
Lorsque le gyroscope est au repos, les deux faisceaux ont la même fréquence (typiquement avec une longueur d'onde de 633 nanomètres).
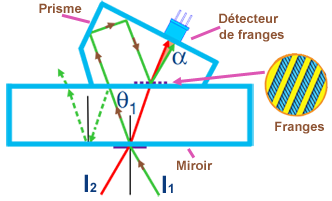
Le dispositif de lecture prélève une fraction des deux faisceaux à l’arrière d’un miroir légèrement transparent.
Le prisme superpose spatialement les deux faisceaux avec un traitement semi-réfléchissant en créant un petit angle α générant le réseau de franges sur la photodiode double. Celle-ci détecte le taux de motif de franges et la direction du mouvement. La fréquence et la phase relative des deux sorties de diodes indiquent l'ampleur et le sens de rotation du gyroscope.
Le couplage énergétique dû aux quelques photons rétrodiffusés par les miroirs fait que, à faible vitesse, les deux ondes se bloquent à la même fréquence. Ce phénomène est appelé "Zone aveugle". Pour y remédier la solution utilisée est d'imprimer un mouvement oscillant permanent au bloc optique à l'aide de la suspension centrale.
Les gyrolasers sont installés suivant le trièdre de l'avion (un pour chaque axe de vol). La sortie peut être utilisée par l'instrumentation analogique ou numérique ainsi que par le pilote automatique. Les gyrolasers sont robustes avec pratiquement aucun entretien en raison de leur nombre de pièces mobiles restreint. Ils sont extrêmement précis et sont généralement considérés comme supérieurs aux gyroscopes mécaniques.
Les accéléromètres
Chaque IRU contient trois accéléromètres, un pour chacun des trois axes (Roulis, Tangage et Lacet).
L'accélération le long de l'axe à controler déplace une masse mobile. Le capteur capacitif convertit le changement de position de cette masse en un signal électrique d'erreur pour le servo amplificateur. Le servo amplificateur annule le signal d'erreur en renvoyant la masse mobile à la position zéro à l'aide d'une bobine torique. Le courant dans la bobine torique nécessaire pour annuler le signal d'erreur, sert de signal de sortie analogique pour représenter l'accélération.
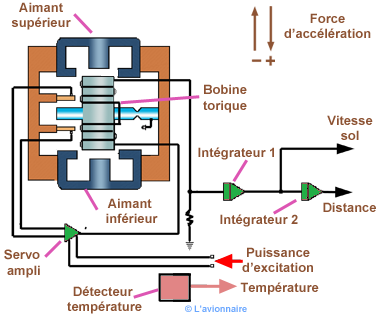
Le signal de sortie analogique est intégré une fois pour donner la vitesse et intégré une deuxième fois pour donner la distance. Un capteur de température est prévu pour chaque axe (X , Y , Z ) afin d'améliorer la précision de l'accéléromètre. Chaque capteur fournit un signal proportionnel à la température. Ce signal est utilisé par l'IRU pour la compensation et la correction des données du capteur.
![]()
