
INSTRUMENTS DE NAVIGATION
CENTRALE INERTIELLE
Préambule
Dans les années 1960 à 1970, la centrale à inertie faisait référence à un système de navigation autonome utilisant une plateforme gyro-stabilisée avec une interface pilote permettant d'entrer un nombre limité de way-points et d'afficher des informations de navigation de base.
Puis dans les années 1980 le système s'améliore, avec la capacité de fournir les données inertielles à d'autres systèmes, tels que le directeur de vol et pilote automatique.
Introduction
Une centrale à inertie ou centrale inertielle INS en anglais (Inertial Navigation System) est un instrument utilisé en navigation, capable d'intégrer les mouvements d'un mobile (accélération et vitesse angulaire) pour estimer son orientation (angles de roulis, de tangage et de cap), sa vitesse linéaire et sa position. L'estimation de position est relative au point de départ ou au dernier point de recalage.
La centrale à inertie est un moyen autonome de navigation qui n'utilise aucune information provenant de sources externes. Source wikipédia.org
Elles fournissent des données de navigation qui sont :
- vitesse sol ;
- route suivie ;
- cap avion ;
- dérive ;
- position longitude et latitude.
Avec ces données, les centrales à inertie déterminent la position de l'avion en connaissant la position de départ et en estimant le trajet parcouru en grandeur et en direction. Et grâce à leur mémoire intégrée, il est possible d'insérer un plan de vol.
Note : Le Nord de référence des centrales à inertie est le Nord Géographique (True North). Il faudra donc tenir compte de la déclinaison pour comparer les informations obtenues avec une référence magnétique.
Il existe deux principaux types de systèmes de navigation inertielle :
- centrale à inertie à cardans ;
- centrale à inertie liées à l'avion.
Centrale à inertie à cardans
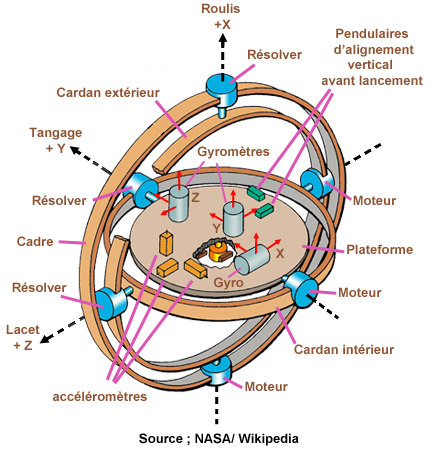
La centrale à inertie comporte :
- une plateforme stabilisée ;
- trois gyroscopes ;
- trois accéléromètres.
Principe de fonctionnement
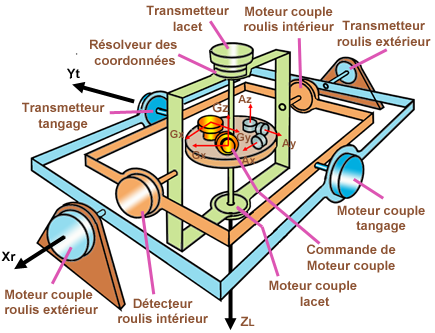
La plateforme est maintenue horizontale par rapport aux repères terrestres quels que soient les mouvements de l'avion. Ceci est réalisé en utilisant des cardans (cadres) qui permettent la liberté de la plate-forme dans les trois axes (assiette, roulis et tangage). Les gyroscopes montés sur la plate-forme détectent n'importe quelles rotations de la plate-forme. Ces signaux sont renvoyés à des moteurs couple qui tournent les cardans pour annuler ces rotations, ce qui maintient la plate-forme alignée sur le cadre global. Pour suivre l'orientation de l'appareil, les angles entre les cardans adjacents peuvent être lus à l'aide de capteurs d'angle.
Généralement trois cardans suffisent, cependant lorsque deux des trois cardans s'alignent et fonctionnent effectivement autour du même axe, lors de mouvements conjugués (Ex : Lacet et Tangage), ils peuvent être verrouillés ensemble et être directement affectés par le mouvement autour du troisième axe restant. La solution consiste à compliquer davantage le système en ajoutant un quatrième cardan motorisé, qui est entraîné en continu pour éviter l'alignement avec les trois autres. Nous aurons donc quatre axes (Roulis extérieur, Roulis intérieur, Tangage et Lacet).
À noter que le calculateur connaît la valeur de la gravité terrestre en tout point et la retranche à l'accélération fournie pour en déduire l'accélération verticale nette de l'avion. Le calculateur doit également calculer la force de Coriolis pour s'en affranchir.
À la mise en marche, la centrale doit être initialisée par l'équipage en rentrant dans l'ordinateur les coordonnées géographiques (longitude et latitude) de l'emplacement où se trouve l'aéronef. Sur les centrales plus récentes l'initialisation peut être effectuée par le GPS.
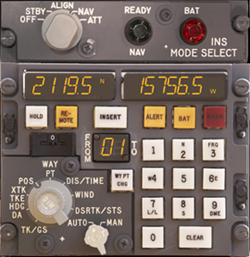
Ci-dessous un MSU (Mode Selector Unit) boitier de commande qui permet de choisir les différents modes de fonctionnement, ainsi que l'affichage des coordonnées.
Les gyroscopes
Les trois gyroscopes à 3 degrés de liberté maintiennent la plate-forme alignée dans les directions d'origine (repère lié aux étoiles lointaines, par exemple), en transmettant toutes variations à des petits moteurs électriques pour maintenir la plate-forme stabilisée.
Les accéléromètres
Les accéléromètres mesurent les trois composantes du vecteur force spécifique. La force spécifique est la somme des forces extérieures autres que gravitationnelles divisée par la masse. Ces accéléromètres sont déjà orientés (généralement nord / sud, est / ouest et haut / bas), ce qui permet des calculs simples pour obtenir la vitesse et la position.
Ci-dessous accéléromètre à ressorts
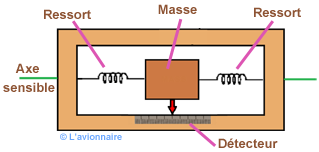
L'accéléromètre massique est constitué d'une masse mobile maintenue en position "nulle" par deux ressorts de force égale et opposée. La masse mobile se déplace plus ou moins suivant l'accélération ou la décélération, sur un seul axe appelé axe sensible. Seules les poussées sur cet axe sont susceptibles d'influencer l'accéléromètre.
À noter qu'il existe plusieurs autres types d'accéléromètres :
- accéléromètre à corde vibrante,
- accéléromètre piézoélectrique.
Inconvénients d'une centrale stabilisée :
En raison de l'assemblage mécanique et de nombreuses pièces mobiles, la plate-forme stabilisée souffre de l'usure et le frottement entraîne une dérive de la sortie dans le temps. La compensation de la dérive nécessite des assemblages de paliers complexes et des lubrifiants spéciaux. La maintenance de la plateforme stabilisée est complexe, coûteuse et prend beaucoup de temps.
Centrale à inertie liée
Dans ce type de centrale liée ou Strapdown (en anglais) les accéléromètres sont fixés par rapport à la structure de l'aéronef, mais la vitesse de rotation est mesurée par trois gyromètres, le traitement du signal permet ensuite de faire les changements de positions.
Les trois gyromètres (instruments qui mesurent une vitesse angulaire) détectent le taux de roulis, de tangage et de lacet. Les trois accéléromètres détectent les accélérations le long de chaque axe de l'aéronef. Un calculateur les intègre et effectue tous les calculs pour satisfaire les six degrés de mouvement (orientation et accélération des axes nord / sud, est / ouest et haut / bas).
Comme pour la centrale stabilisée le calculateur connaît la valeur de la gravité terrestre en tout point et la retranche et calcule la force de Coriolis pour s'en affranchir.
Avantages d'une centrale liée :
Avec peu de pièces mobiles, elles sont plus faciles à entretenir et plus fiables au fil du temps. Elles nécessitent des gyroscopes plus précis et une plus grande puissance de calcul. Cependant, les avantages d'un coût, d'une taille, d'un poids et d'une fiabilité réduits font de ces systèmes le choix préféré des centrales pour les aéronefs.
![]()
